الأحد، 10 ديسمبر 2017
الروبورت:
الروبوت بالعربيّة تعني الرجل الآلي، أو الإنسالة، أو بتعبير أبسط فإنّه آلة قادرة على التفكير واتخاذ القرار، أو الآلة الذكية. فليست كل الآلات روبوتات، لكن جميع الروبوتات آلات؛ إذ أنّ الآلات العادية مثل الغسالة والثلاجة وجهاز التلفاز، لا تعدّ بصورتها الطبيعية روبوتات، ولكن مثلًا طيارة التتبّع التي تستطيع اتخاذ قرار بطريق سيرها، ومتى تختبئ ومتى تظهر، وما هو التحرّك المشبوه، هي آلة ذكية بلا شك، ونطلق عليها اسم روبوت.
لغات الروبورت:
إن الروبوتات الصناعية الأولى هي عبارة عن آلات يتحكم بها بواسطة المحركات ، و عن طريق متحكمات منطقية مبرمجة . و قد برمجت الأوامر عموماً عن طريق المستخدم . إن لغة MHI كانت لغة برمجة الروبوتات الأولى ، و من ثم طورت إلى MIT خلال السنوات الأولى من الستينات من القرن الماضي . و هي التي كانت تستخدم في الحاسبات الأولى و من ثم طورت هذه اللغة في جامعة ستانفورد في بداية عام 1970 بحيث اعتمدت على لغتي برمجة هما الباسكال و ال (ALGOL) . و من ثم ظهرت لغة البرمجة (VAL) و (VALII) في عام 1984 و التي طورتها شركة يونيميشن المحدودة . كما ظهرت لغة AML(A Manfacturing Language) في عام 1982 ثم طورتها شركة IBM الأمريكية . و كما ظهرت لغة جديدة سميت ب AUTOMATIX طورها ماكدونيل دوغلاس في نهاية عام 1983 و التي كانت تدعم مجموعة كبيرة من تطبيقات الروبوت التي قد تطور خلال هذه الفترة . أما بالنسبة للغة (V+) فكانت تعتبر من لغات برمجة الروبوتات الحديثة و كانت لديها أكثر من مائة تعليمة في برمجة هذه الروبوتات لتنفيذ حركات متعددة و متتالية .
التحكم بالروبوت : إن أوامر البرنامج المطلوب للتحكم بالروبوت يجب أن تسيطر على حركة الروبوت و تحديد موقعه ، و المسير و السرعة و التسارع و تجنب أي عائق . فمثلاً في لغة (V+) أوامر التحكم بالروبوت هي كما يلي :
MOVE : هي تحريك الروبوت إلى موقع جديد محدد بالرمز .
APPRO: هي تحريك الروبوت إلى موقع آخر من موقع مسمى أي أنها تحرك المؤثر النهائي أو الأداة إلى المكان المحدد بالرمز ، ولكنه يبدأ بالقياس اعتباراً من نقطة على المحور Z.
فالأمر APPRO A,50 هو أمر تحريك الأداة إلى مسافة 50 عن النقطة A باتجاه المحور Z للأداة .
APPRO : و هي مشابهة ل APPRO فيما عدا أن الحركة إلى جوار المكان المحدد تكون على مسار خطي.
DEPART : و هي تحريك الأداة بالمسافة المرادة وفق المحور و اعتباراً من الوضع الحالي للأداة . فمثلاً
DEPART 50 يتم فيها تحريك الأداة إلى الوراء اعتباراً من الموقع الحالي بمقدار 50 مم .
DELAY : و هي إيقاف الحركة و ذلك لفترة معينة من الوقت . فمثلاً DELAY 3 تعني إيقاف الحركة و ذلك لمدة 3 ثواني .
SPEED : و هي تعليمة يتم فيها تحديد السرعة للحركات .
ACCEL : و هي تحديد التسارع و التباطؤ في حركة الروبوت .
SINGLE : تحديد حركة الوصلة أو النهاية .
MULTIPLE : و هي السماح بحركة كاملة لنهاية الوصلة (المعصم) .
OPEN : و هي تعليمة لتحديد وضعية الماسك على الوضعية المفتوحة .
CLOSE : هي تعليمة لتحديد وضعية الماسك على الوضعية المغلقة .
التحكم بالنظام : بالإضافة إلى التحكم بحركة الروبوت ، يجب على النظام أن يدعم البرنامج من حيث تصميمه ، و يتضمن التحكم بالنظام برامج معالجة البيانات و برامج خزن البيانات و برامج التحكم و نظام التحكم بالحساسات الخارجية . و كمثال عن أوامر التحكم في لغة (V+) مايلي :
EDIT : و هذا الأمر يحدد منطقة في البرنامج لإجراء تعديل فيه .
STORE : و هي تعليمة تخزين المعلومات من الذاكرة إلى ملف .
LOAD : و هي قراءة محتويات القرص إلى الذاكرة .
COPY : و هي نسخ ملف محفوظ على قرص إلى برنامج جديد .
SPEED : و هو الأمر الذي يحدد سرعة حركة الروبوت الإجمالية .
EXECUTE : و هي التنفيذ للبرنامج الموجود .
ABORT : و هي إيقاف تنفيذ البرنامج .
Do : و هي تنفيذ أمر وحيد في البرنامج .
WHERE : و هي تحديد مكان موقع الروبوت .
TEACH : و هي تعريف سلسلة من المواقع المحتملة .
TIME : عرض البيانات و الوقت .
ENABLE : و هي أمر تشغيل واحد أو أكثر من مفاتيح النظام .
قواعد المعطيات و البنية : إن أوامر البرنامج تحتاج إلى ترتيب و تحكم منطقي في تنفيذها ضمن برنامج يتحكم بالروبوت و الأمثلة تتضمن الأوامر التالية :
FOR : لتنفيذ عدد من الأوامر و لعدة مرات .
WHILE : و هي الاستمرار بتنفيذ مجموعة الأوامر و حتى الوصول إلى الغرض المطلوب.
DO : و هي تنفيذ عدة أوامر و حتى الوصول إلى الهدف المرجو .
IF : مراقبة فيما إذا تم تنفيذ الأوامر أو لا .
PARAMETER : و هي وضع قيمة بارا متر النظام .
بعض الوظائف الخاصة : و هذه الوظائف تكون ضرورية من أجل تسهيل برمجة الروبوت ، و هذه الوظائف تتضمن تعابير رياضية و أوامر لتحويل البيانات و معالجتها كما يلي في بعض الأمثلة :
ABS : قيمة مطلقة .
COS : و هو جيب التمام .
SQRT : و هو الجذر التربيعي .
BCD : و هو متحول من النظام الحقيقي إلى العشري إلى الثنائي .
DCB : متحول من الثنائي إلى الحقيقي .
تنفيذ البرنامج : إن تنظيم البرنامج في تسلسل الأوامر القابلة للتنفيذ تتطلب جدولة المهمات و كمثال على ذلك الأوامر التالية :
PECEXECUTE : و هي القيام بتنفيذ معالجة لبرنامج التحكم .
PCABORT : و هي التوقف عن تنفيذ معالجة برنامج التحكم .
PCRETRY :و هي الاستمرار أو الاستئناف بتنفيذ آخر خطوة بعد حدوث خطأ ما .
PCEND : و هي توقف تنفيذ البرنامج عند النهاية و من ثم إعادة دورة التنفيذ من جديد في حال تشابه العمليات .
مثال عن برنامج :
1: PROGRAM 2: PICK UP: It is the lifting of parts from one location to another 3: PART = 100 and is the number of parts that will be run 4: HEIGHT = 25, and is the distance to be referred to the part of the required 5: OPEN instruction is made by the robot is open 6: MOVE START instruction to move a robot to the site to start work 7: FOR I = 1 TO PARTS is the operation of the parts 8: APPRO PICK 9: MOVE PICK 10: CLOSE namely the closure of the hand or the handle 11: DEPARTS HEIGHT1 and moving the tool is high-mentioned on the same axis, and as of the current status of the tool. 12: MOVES PLACE is to move the robot 13: OPENI of the liberalization of the piece 14: DEPARTS HEIGHT 2 is the instruction and return the handle to the high No. 2 15: END. Transition to the other part of the process. 16: STOP the termination of the program 17: END.
الترجمة باللغة العربية
1: PROGRAM 2: PICK UP : و هي رفع الأجزاء من موقع إلى آخر 3: PART = 100 و هي عدد الأجزاء التي سيتم تشغيلها 4: HEIGHT= 25 و هي المسافة المراد رفعها للجزء المطلوب 5: OPEN و هي تعليمة تجعل يد الروبوت مفتوحة 6: MOVE START وهي تعليمة تحريك الروبوت إلى الموقع لبدء العمل 7: FOR I = 1 TO PARTS و هي تشغيل الأجزاء 8: APPRO PICK 9: MOVE PICK 10: CLOSE وهي إغلاق اليد أو المقبض 11: DEPARTS HEIGHT1 و هي تحريك الأداة بالارتفاع المذكور على نفس المحور و اعتباراً من الوضع الحالي للأداة . 12: MOVES PLACE و هي تحريك الروبوت 13: OPENI وهي تحرير القطعة 14: DEPARTS HEIGHT 2 و هي تعليمة عودة المقبض إلى الارتفاع رقم 2 15: END. الانتقال إلى الجزء الآخر من العملية . 16: STOP إنهاء البرنامج 17: END .
التحكم بالروبوت : إن أوامر البرنامج المطلوب للتحكم بالروبوت يجب أن تسيطر على حركة الروبوت و تحديد موقعه ، و المسير و السرعة و التسارع و تجنب أي عائق . فمثلاً في لغة (V+) أوامر التحكم بالروبوت هي كما يلي :
MOVE : هي تحريك الروبوت إلى موقع جديد محدد بالرمز .
APPRO: هي تحريك الروبوت إلى موقع آخر من موقع مسمى أي أنها تحرك المؤثر النهائي أو الأداة إلى المكان المحدد بالرمز ، ولكنه يبدأ بالقياس اعتباراً من نقطة على المحور Z.
فالأمر APPRO A,50 هو أمر تحريك الأداة إلى مسافة 50 عن النقطة A باتجاه المحور Z للأداة .
APPRO : و هي مشابهة ل APPRO فيما عدا أن الحركة إلى جوار المكان المحدد تكون على مسار خطي.
DEPART : و هي تحريك الأداة بالمسافة المرادة وفق المحور و اعتباراً من الوضع الحالي للأداة . فمثلاً
DEPART 50 يتم فيها تحريك الأداة إلى الوراء اعتباراً من الموقع الحالي بمقدار 50 مم .
DELAY : و هي إيقاف الحركة و ذلك لفترة معينة من الوقت . فمثلاً DELAY 3 تعني إيقاف الحركة و ذلك لمدة 3 ثواني .
SPEED : و هي تعليمة يتم فيها تحديد السرعة للحركات .
ACCEL : و هي تحديد التسارع و التباطؤ في حركة الروبوت .
SINGLE : تحديد حركة الوصلة أو النهاية .
MULTIPLE : و هي السماح بحركة كاملة لنهاية الوصلة (المعصم) .
OPEN : و هي تعليمة لتحديد وضعية الماسك على الوضعية المفتوحة .
CLOSE : هي تعليمة لتحديد وضعية الماسك على الوضعية المغلقة .
التحكم بالنظام : بالإضافة إلى التحكم بحركة الروبوت ، يجب على النظام أن يدعم البرنامج من حيث تصميمه ، و يتضمن التحكم بالنظام برامج معالجة البيانات و برامج خزن البيانات و برامج التحكم و نظام التحكم بالحساسات الخارجية . و كمثال عن أوامر التحكم في لغة (V+) مايلي :
EDIT : و هذا الأمر يحدد منطقة في البرنامج لإجراء تعديل فيه .
STORE : و هي تعليمة تخزين المعلومات من الذاكرة إلى ملف .
LOAD : و هي قراءة محتويات القرص إلى الذاكرة .
COPY : و هي نسخ ملف محفوظ على قرص إلى برنامج جديد .
SPEED : و هو الأمر الذي يحدد سرعة حركة الروبوت الإجمالية .
EXECUTE : و هي التنفيذ للبرنامج الموجود .
ABORT : و هي إيقاف تنفيذ البرنامج .
Do : و هي تنفيذ أمر وحيد في البرنامج .
WHERE : و هي تحديد مكان موقع الروبوت .
TEACH : و هي تعريف سلسلة من المواقع المحتملة .
TIME : عرض البيانات و الوقت .
ENABLE : و هي أمر تشغيل واحد أو أكثر من مفاتيح النظام .
قواعد المعطيات و البنية : إن أوامر البرنامج تحتاج إلى ترتيب و تحكم منطقي في تنفيذها ضمن برنامج يتحكم بالروبوت و الأمثلة تتضمن الأوامر التالية :
FOR : لتنفيذ عدد من الأوامر و لعدة مرات .
WHILE : و هي الاستمرار بتنفيذ مجموعة الأوامر و حتى الوصول إلى الغرض المطلوب.
DO : و هي تنفيذ عدة أوامر و حتى الوصول إلى الهدف المرجو .
IF : مراقبة فيما إذا تم تنفيذ الأوامر أو لا .
PARAMETER : و هي وضع قيمة بارا متر النظام .
بعض الوظائف الخاصة : و هذه الوظائف تكون ضرورية من أجل تسهيل برمجة الروبوت ، و هذه الوظائف تتضمن تعابير رياضية و أوامر لتحويل البيانات و معالجتها كما يلي في بعض الأمثلة :
ABS : قيمة مطلقة .
COS : و هو جيب التمام .
SQRT : و هو الجذر التربيعي .
BCD : و هو متحول من النظام الحقيقي إلى العشري إلى الثنائي .
DCB : متحول من الثنائي إلى الحقيقي .
تنفيذ البرنامج : إن تنظيم البرنامج في تسلسل الأوامر القابلة للتنفيذ تتطلب جدولة المهمات و كمثال على ذلك الأوامر التالية :
PECEXECUTE : و هي القيام بتنفيذ معالجة لبرنامج التحكم .
PCABORT : و هي التوقف عن تنفيذ معالجة برنامج التحكم .
PCRETRY :و هي الاستمرار أو الاستئناف بتنفيذ آخر خطوة بعد حدوث خطأ ما .
PCEND : و هي توقف تنفيذ البرنامج عند النهاية و من ثم إعادة دورة التنفيذ من جديد في حال تشابه العمليات .
مثال عن برنامج :
1: PROGRAM 2: PICK UP: It is the lifting of parts from one location to another 3: PART = 100 and is the number of parts that will be run 4: HEIGHT = 25, and is the distance to be referred to the part of the required 5: OPEN instruction is made by the robot is open 6: MOVE START instruction to move a robot to the site to start work 7: FOR I = 1 TO PARTS is the operation of the parts 8: APPRO PICK 9: MOVE PICK 10: CLOSE namely the closure of the hand or the handle 11: DEPARTS HEIGHT1 and moving the tool is high-mentioned on the same axis, and as of the current status of the tool. 12: MOVES PLACE is to move the robot 13: OPENI of the liberalization of the piece 14: DEPARTS HEIGHT 2 is the instruction and return the handle to the high No. 2 15: END. Transition to the other part of the process. 16: STOP the termination of the program 17: END.
الترجمة باللغة العربية
1: PROGRAM 2: PICK UP : و هي رفع الأجزاء من موقع إلى آخر 3: PART = 100 و هي عدد الأجزاء التي سيتم تشغيلها 4: HEIGHT= 25 و هي المسافة المراد رفعها للجزء المطلوب 5: OPEN و هي تعليمة تجعل يد الروبوت مفتوحة 6: MOVE START وهي تعليمة تحريك الروبوت إلى الموقع لبدء العمل 7: FOR I = 1 TO PARTS و هي تشغيل الأجزاء 8: APPRO PICK 9: MOVE PICK 10: CLOSE وهي إغلاق اليد أو المقبض 11: DEPARTS HEIGHT1 و هي تحريك الأداة بالارتفاع المذكور على نفس المحور و اعتباراً من الوضع الحالي للأداة . 12: MOVES PLACE و هي تحريك الروبوت 13: OPENI وهي تحرير القطعة 14: DEPARTS HEIGHT 2 و هي تعليمة عودة المقبض إلى الارتفاع رقم 2 15: END. الانتقال إلى الجزء الآخر من العملية . 16: STOP إنهاء البرنامج 17: END .
عمليّات الطبيّة، خاصّة الجراحيّة:
أضاف الروبوت إلى الطبّ وجهاً جديداً، حيث زاد من قدرة الجرّاحين على القيام بعمليّات جراحيّة يصعبُ على الإنسان القيامُ بها، حيث يقوم الجرّاح بتحريك وتوجيه أيدي الروبوت باستخدام الحاسوب، حيث إنّ أوامر الجراح على الكمبيوتر يقومُ الكمبيوتر بتحليلها وترجمتها، ثم تنفذ على جسم المريض بواسطة أيدي الروبوت، ومن المهمّ معرفة أنّ الروبوتَ اليوم متطوّر لدرجةٍ كبيرة، حيث إنّ الجرّاحَ يمكنه إجراء العمليّة عن مكان بعيد عن غرفة العملية، كما أنّ الروبوت مكّنَ الجرّاح من إجراء العمليّة لمريض في بلد آخر.
تُستخدم الروبوتات في يومِنا هذا في جراحةِ القلب المفتوح، وجراحة المستقيم، والبروستات، والمستقيم، وكذلك في جراحة سرطان الحلق، وغيرها الكثير من الجراحات. والجدير بالذكر أنّ الجراحة بواسطة الروبوت تحقّقُ دقّة كبيرة، وتقلّلُ كميّة الدم المستنزفة، كما أنّها تقلّلُ من الألم ومن حجم الجرح.
السبت، 9 ديسمبر 2017
ماهي أهمية الروبوت ؟
المهام الخطرة كالبحث عن القنابل أو تفقد الاماكن الملوثة إشعاعيا او انتشال حطام سفينة .
المهام التي تحتاج للدقة كعمليات التصنيع كما في مصانع السيارات والاجهزه الالكترونيه وغيرها .
كيف يعمل الروبوت ؟
الروبوت مزود بمجسمات إحساس تشابه حواس الإنسان فمنها مايحس بالضوء ومنها مايحس بالحرارة وذلك حتى يكون قادر على الاستجابة والتفاعل طبقا للظروف وتغيراتها من حوله , وبهذا يكون الروبوت آله استشعار ذكية تقوم بعمل عضوي مثل التحرك ومناولة الاشياء وهي ذاتية التحكم بفعل البرمجة المخزنة في داخلها بواسطة الحاسب الآلي.
هل ثقافة الروبوت منتشرة في مجتمعنا ؟
أتمنى من الجهات التعليمية و بالذات التدريبية ( الكليات التقنية ) أن تساهم في نشر ثقافة الروبوت من خلال مناهجها و حقائبها التدريبية لتساعد المتدربين و المتدربات على فهم واستيعاب وتعلم ثقافة الروبوت .
كما أتمنى من المسئولين في ( جامعة جازان ) إنشاء مركز الروبوت كمشروع تعليمي متخصص و إقامة المسابقات العلمية خلال المناسبات كالمهرجانات الصيفية و الربيعية من اجل غرس مفهوم تقنية الروبوت وزيادة العلم والمعرفة بالروبوت واكتساب المهارات الصناعية .
الروبوت في خيال الأدباء

كان الأديب التشيكي كارل كابك هو أول من أطلق كلمة robot و كان ذلك في أوائل القرن العشرين ، و من ثم ذاع استخدام هذه الكلمة ، و بعد إنتاج روايته الشهيرة انسالة روسوم العالمي rossum’s universal robots في مدينة براغ سنة 1921 حيث صور الكاتب الانسالة و كأنه إنسان humanoid و لكنه آلة يمكن إنتاجها في المصنع بسرعة و بتكلفة قليلة. و قد اشتقت كلمة انسالة من الكلمة التشيكية انسالةا robota و تعني أعمال السخرة أو العبودية. و هكذا اعتبر الانسالة عبدا للجنس البشري ، أو مجرد إنسان آلي أو أوتوماتيكي . بعد سنتين من صدور الرواية تمت ترجمتها إلى الإنجليزية وفي أكتوبر 1922 تم تحويل الرواية إلى عمل مسرحي تم تقديمه على مسرح جاريك في نيويورك وفيه يسافر البروفيسور روسوم إلى جزيرة نائية لغرض دراسة أمواج البحر ويحاول أثناء وجوده على الجزيرة تصنيع مادة حية من مزج مواد كيميائية ويحاول لسنوات خلق هذا الكائن فتفشل محاولاته في خلق كلب وبعد 10 سنوات يتمكن من تصنيع انسالة بمساعدة ابنه.
الروبوت في المستقبل

مع التطور التقني الكبير الذي تشهده البشرية حاليا، بدأت تظهر منذ عدة سنوات أبحاث ونماذج لأنظمة تقنية قادرة على توفير المساعدة والدعم للمستخدم على غرار الطائرات من دون طيار والسيارات الذاتية القيادة والروبوتات المتعاونة مع الإنسان، كما يتوقع أن نرى مستقبلا تقنيات قادرة على التفاعل مع الإنسان بشكل أكبر من خلال امتلاكها صفات بشرية، مثل القدرة على التخاطب مع الإنسان أو حتى حس الفكاهة. وتم بالفعل تطوير روبوت قادر على التفاعل مع الإنسان وأداء أفعال كوميدية يدعى “جينجر”، وتصفه مطورته هيثر نايت، الباحثة في معهد الروبوتات التابع لجامعة كارنيج ميلون الأميركية بأنه يتميز بدرجة معقولة من الذكاء العاطفي.
تطور الروبوت (علم الروبوتات التطوري)

علم الروبوتات التطوري (ER) هو منهجية تستخدم الحوسبة التطورية لتطوير وحدات تحكم خاصة بـالروبوتات المستقلة بذاتها. وتعمل الخوارزميات في الروبوتات التطورية بشكل متكرر على فئات من وحدات التحكم المرشحة، التي يتم اختيارها مبدئيًا من بين مجموعة من التوزيعات. ويجري تعديل هذه الفئة بصورة متكررة وفقًا لـدالة اللياقة. وفي حالة الخوارزمية الجينية (أو “GA”)، وهي طريقة شائعة في الحوسبة التطورية، يتم تطوير فئة وحدات التحكم على نحو متكرر وفقًا للعبور والتبديل وغيرها من عوامل الخوارزمية الجينية ثم يتم انتقاؤها وفقًا لـدالة اللياقة. ويمكن استخلاص وحدات التحكم المرشحة المستخدمة في تطبيقات الروبوتات التطورية من بعض المجموعات الفرعية من مجموعةالشبكات العصبية الاصطناعية، على الرغم من أن بعض التطبيقات (بما في ذلك تطبيق SAMUEL، الذي تم تطويره في مركز البحرية للأبحاث التطبيقية في الذكاء الاصطناعي) تستخدم مجموعات مختارة من قواعد “IF THEN ELSE” كأجزاء مكونة من وحدة تحكم فردية. ومن الممكن نظريًا استخدام أي مجموعة من الصياغات الرمزية لـقوانين التحكم (التي تُسمى في بعض الأحيانسياسات في مجتمع التعلم الآلي) كمساحة لوحدات التحكم المرشحة المحتملة. ويمكن أيضًا استخدام الشبكات العصبية الاصطناعية لـتعلم الروبوتات خارج نطاق الروبوتات التطورية. ويمكن استخدام أشكال أخرى من التعلم التعزيزي، على نحو خاص، لتعلم وحدات التحكم الخاصة بالروبوتات.
الروبوت قديما

لو أراد الإنسان أن يعيش حقاً فعليه أن يعمل ويكون جريئاً ” (روبرت فروست)
هكذا يقول روبرت فروست أحد أهم الشعراء الأمريكيين , فبالعلم والعمل تزدهر الأمم وتطور وتعيش بالرفاه والنعيم وبالإبداع والجرأة نبتكر ونصبح مخترعين , لقد رئينا الآن وعبر التاريخ الطويل الكثير من الاختراعات والابتكارات التي أذهلت البشرية , سيكون موضوعنا اليوم عن الرجل الآلي .
هل تعلم أن المسلمين هم أول من اخترع الرجل الآلي وليس اليابانيين ؟
قبل 8 قرون من الآن طلب ملك ديار بكر من المهندس المسلم بديع الزمان الجزري اختراع آلة لتغنيه عن الخدم فكان ذلك حيث اخترع الجزري رجل آلي على شكل غلام يحمل الماء والمنشفة والمرآة والمشط ليساعد الملك أثناء الوضوء عن طريق سكب الماء وإعطاء المنشفة والمرآة والمشط وبعد أن ينتهي يعود الغلام الآلي الى مكانه وكان على رأسه طائر ليغرد للملك في وقت الصلاة حتى يذكره بموعدها , ألف المهندس الجزري كتاب ” الحيل الجامع بين العلم والعمل ” وفيه يتحدث عن اختراعاته وعن الهندسة والميكانيك بشكل عام ويسمى الآن هذا الكتاب في أوروبا ” الحيل الهندسية ” حيث ترجم الى جميع اللغات الأوروبية وهو يعتبر من أهم الكتب الهندسية في التاريخ العربي والإسلامي , والى يومنا هذا توجد منه نسخ أصلية في متاحف أوروبا حيث يعتبر من التراث الهندسي المهم جدا .

الإنسان يتعامل مع الروبوت بشكل جيد حتى أنّ الدكتور أمير نال على درجة الدكتوراه من المدرسة القومية العليا للعلوم المتقدمة بباريس، بعد أن وضعته جامعة كامبريدج ضمن موسوعتها، باعتباره أحد شباب الباحثين الواعدين على مستوى العالم فى مجال أبحاث الإنسان الآلى التفاعلى.
يقول «على» لـ«المصرى اليوم»، فى اتصال هاتفى من مقر إقامته بفرنسا، إن دراستى تركزت فى كيفية تصميم ريبوت قادر على أن يكون لديه قدر من الوعى والذكاء ليقوم بتنفيذ تصرفات جديدة ملائمة لسياق التفاعل مع الإنسان، لم يتدرب عليها من قبل، لمواجهة جميع المواقف، وبالنسبة لتحليل عاطفة الإنسان، نجد أنه على سبيل المثال فى التعاملات الإنسانية العادية، إذا كان هناك شخص حزين وحدث أن فهم شخص مشاعره بالخطأ على أنه سعيد، وقام برد فعل يتضمن سعادته سيكون رد فعل غير مهذب وغير مقبول.
يضيف «على»: الأمر نفسه يتم على مستوى الروبوت، حيث يجب أن يكون عنده القدرة على التصرف لفظيا وحركيا بشكل يتناسب مع عاطفة الإنسان المتفاعل، وعلى التمييز بين خصائص العواطف التى تدرب عليها، وخصائص العواطف الجديدة، حتى يستطيع تخليق سلوك لفظى وحركى مُركّب ملائم لطبيعة العاطفة الجديدة التى يستخدمها الإنسان فى التفاعل.
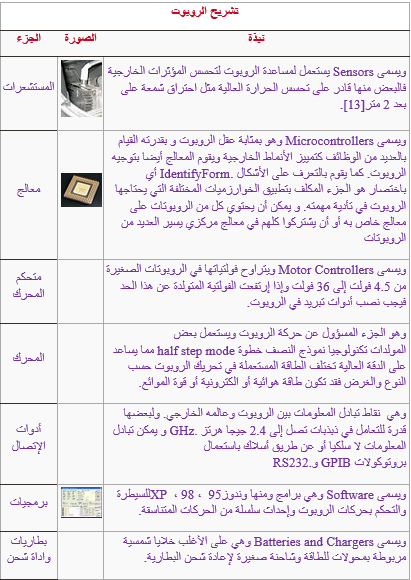
مكونات الإنسان الآلي (الروبوت)
1-وحدة السيطرة المركزية أو المعالج(controller):وضيفتها التنظيم و السيطرة على حركة مفاصل الذراع الالية.
2-الذراع(Arm):وضيفته إيصال النهاية الحرة للروبوت إلى الموقع الصحيح.
3-القائد(Drive):وضيفته العمل كمصدر لحركة الذراع.
4-النهاية الحرة(End-Effector):تعمل كحاملة لحمل الأداة المستخدمة لتنفيذ المهام المناطة بها .
5-المستشعرات (Sensors): تستعمل لمساعدة الإنسان الآلي لتحسس المؤثرات الخارجية.
استخدامات
الروبورت
الخدمات العسكرية:
 الروبوتات العسكرية
هي جزء من أغلب الروبوتات عالية التكنولوجيا والمهمة المستخدمة اليوم. فتلك
الآلات المتطورة تنقذ الأرواح عبر أداء مهام شديدة الخطورة دون تعريض حياة البشر
للخطر، فبعض الروبوتات الشائعة التي يستخدمها الجيش هي روبوتات التخلص من
المتفجرات القادرة على فحص طرود متفجرة ومحاصرة مناطق للعثور على الأجهزة
التفجيرية يدوية الصنع والألغام وإبطال مفعولها. ويمكنها حتى توجيه الأجسام
التي لم تنفجر للفحص والتفجير في الوقت المناسب، كما أن الجيش يمكنه أيضاً استخدام
طيارات صغيرة بدون طيار في مهام استطلاعية لرصد تحركات العدو والعثور على
المتفجرات المخبأة ومنح القوات الجوية مراقبة واسعة المدى لساحة المعركة.
الروبوتات العسكرية
هي جزء من أغلب الروبوتات عالية التكنولوجيا والمهمة المستخدمة اليوم. فتلك
الآلات المتطورة تنقذ الأرواح عبر أداء مهام شديدة الخطورة دون تعريض حياة البشر
للخطر، فبعض الروبوتات الشائعة التي يستخدمها الجيش هي روبوتات التخلص من
المتفجرات القادرة على فحص طرود متفجرة ومحاصرة مناطق للعثور على الأجهزة
التفجيرية يدوية الصنع والألغام وإبطال مفعولها. ويمكنها حتى توجيه الأجسام
التي لم تنفجر للفحص والتفجير في الوقت المناسب، كما أن الجيش يمكنه أيضاً استخدام
طيارات صغيرة بدون طيار في مهام استطلاعية لرصد تحركات العدو والعثور على
المتفجرات المخبأة ومنح القوات الجوية مراقبة واسعة المدى لساحة المعركة. في إنتاج السيارات:
في إنتاج السيارات:
تُستخدم الروبوتات في
صناعة السيارات في المساعدة في تجميعها، فتلك الآلات رفيعة المستوى تتمتع بأذرع
ميكانيكية بها أدوات، وعجلات، ومجسات تجعلها مثالية لوظائف خط التجميع. ولا
توفر الروبوتات المال في تكلفة التصنيع فحسب، بل تؤدي مهام قاسية بوتيرة لا يمكن
لأي إنسان أن يقوم بها. كما أن الروبوتات تجعل تصنيع السيارات أكثر أمناً
لأنها يمكنها أن تنفذ وظائف خطيرة وصعبة بدلاً من البشر. وتقدر روبوتات صناعة
السيارات على أداء مهام على نطاق واسع مثل التركيب والطلاء ولحام المعادن ولا
تتقيد بإرهاق أو مخاطر صحية مما يجعلها مفيدة لحد لا يمكن تصديقه وجزء لا بديل له
في إنتاج السيارات.
في إكتشاف الفضاء:
واحدة من أهم المناطق
المذهلة في علم الروبوتات هو استخدامها في الفضاء، فتلك الآلات المتطورة تمنح رواد
الفضاء فرصة اكتشاف الفضاء بأكثر الطرق المحيرة، فالروبوتات الأكثر شيوعاً في
استخدامها في الفضاء هي مركبات التحكم عن بعد ونظام المعالجة عن بعد وكلاهما
مستخدم بكثرة في مهام الفضاء. فمركبات التحكم عن بعد يمكن أن تكون مركبات
فضائية بدون إنسان تدور في مداراتها البحرية أو تهبط حينما تتصل بالفضاء الخارجي
وتستكشف الأرض. فكلاهما يحصل على معلومات رائعة ولقطات بصرية لم يكن الإنسان
ليستطع الحصول عليها دون مساعدة الروبوتات. وأسلحة نظام المعالجة عن بعد
الميكانيكية تساعد أيضاً رواد الفضاء على أداء مهام شديدة الأهمية والصعوبة أثناء
مهام الفضاء.
في إكتشاف ما تحت الماء:
تستطيه روبوتات ما تحت الماء يمكنها الغوص لمسافة أطول وأعمق من أي إنسان كما تتيح نظرة عن قرب للحياة البحرية. فتلك الآلات المذهلة زودت بمجسات وكاميرات عالية الوضوح وعجلات وتكنولوجيا أخرى لمساعدة العلماء عندما يستكشفون المراسي وقيعان المحيطات والسدود وبطون السفن وغيرها من الأسطح. وأكثر روبوتات ما تحت الأرض معرفة ويستخدم اليوم هي المركبات التي تعمل عن بعد ويتحكم بها أفراد جالسون في مركز القيادة، وهذه المركبات متصلة عن طريق كابلات بالسفن وهي أفضل وسيلة لجمع معلومات وصور للحياة تحت الماء.
في الجراحة عن بعد و
الجراحة محدودة التدخل :
 غيرت الجراحة بمساعدة
الروبوت حقاً وجه الطب عبر زيادة قدرات الجراحين بطريقة لا يقدر الإنسان عليها،
فالروبوتات الجراحية يوجهها الجراح الذي يستخدم وحدة تحكم الكمبيوتر لتحريك
الأدوات المرفقة بأذرع الروبوت، فحركات الجراح يترجمها كمبيوتر ثم تُنفذ على
المريض بواسطة الروبوت. والروبوتات الجراحية اليوم شديدة التطور لدرجة أنها
تمكن الجراحين من إجراء جراحة عن بعد دون التواجد جسدياً بغرفة الجراحة أو حتى في
البلد ذاته. وقد حسنت الجراحة بمساعدة الروبوت محدودية الجراحة محدودة التدخل
الجراحي كما تمتعت بميزات على الجراحة المفتوحة التقليدية، بما في ذلك دقة أكبر،
وجرح أصغر، وألم أقل، وانخفاض في فقد الدم. وتستخدم الروبوتات مثل نظام
دافنشي الجراحي في طب النساء والمستقيم والقولون والبروستات وجراحات سرطان الحلق
بالإضافة إلى جراحة علاج البدانة والقسطرة وجراحة تغيير الشرايين.
غيرت الجراحة بمساعدة
الروبوت حقاً وجه الطب عبر زيادة قدرات الجراحين بطريقة لا يقدر الإنسان عليها،
فالروبوتات الجراحية يوجهها الجراح الذي يستخدم وحدة تحكم الكمبيوتر لتحريك
الأدوات المرفقة بأذرع الروبوت، فحركات الجراح يترجمها كمبيوتر ثم تُنفذ على
المريض بواسطة الروبوت. والروبوتات الجراحية اليوم شديدة التطور لدرجة أنها
تمكن الجراحين من إجراء جراحة عن بعد دون التواجد جسدياً بغرفة الجراحة أو حتى في
البلد ذاته. وقد حسنت الجراحة بمساعدة الروبوت محدودية الجراحة محدودة التدخل
الجراحي كما تمتعت بميزات على الجراحة المفتوحة التقليدية، بما في ذلك دقة أكبر،
وجرح أصغر، وألم أقل، وانخفاض في فقد الدم. وتستخدم الروبوتات مثل نظام
دافنشي الجراحي في طب النساء والمستقيم والقولون والبروستات وجراحات سرطان الحلق
بالإضافة إلى جراحة علاج البدانة والقسطرة وجراحة تغيير الشرايين.
في تنظيف الانابيب:
تقوم الروبوتات على نحو أفضل بتنظيف الأنابيب لأنها بالفعل تناسب هذه المساحات
الخطرة والضيقة. وتوفر الروبوتات تنظيفاً أكثر فاعلية ودقة من الفرشاة
اليدوية، كما أن استخدام الروبوتات أكثر أمناً للأسواق الصناعية والمؤسسية حتى لا
يتعرض العمال لمواد كيماوية ضارة أو إنزيمات تأتي من الغبار. وتستخدم روبوتات
تنظيف الأنابيب في المستشفيات والمبان الحكومية التي قد تشمل بيئات خطرة وملوثة
بالإضافة إلى السفارات والسجون من أجل تنظيف أقصر وقتاً وأكثر أمناً. إن
استخدام روبوتات تنظيف الأنابيب يجعل عملية التنظيف أسرع وأكثر أمناً وأرخص وأكثر
فاعلية دون الحاجة للإنسان.
في مكافحة الجريمة:

في إصلاح التسربات
البترولية:
كما رأينا
تسرب النفط من شركة بي بي في عام 2010 فقد لعبت الروبوتات دوراً حاسماً
في إصلاح تسرب النفط. فقد استخدمت روبوتات ما تحت الماء لاستكشاف موقع البئر
والتفاعل مع مشكلات المعدات، فقد استخدم المهندسون الروبوتات التي تعمل بالتحكم عن
بعد والتي تغوص في أعماق بعيدة وتغطس لمدة أطول مما قد يتحمله الإنسان على الإطلاق. والروبوتات
التي تعمل بالتحكم عن بعد هي غواصات يتم التحكم فيها عن بعد وتعمل عن طريق بشر
يجلسون في مركز التحكم. والروبوتات عالية التكنولوجيا تلك متصلة بسفن من خلال
كابلات وتستخدم في جمع لقطات فيديو ومعلومات من مجسات مصنوعة من الألياف البصرية
والأمر الذي يساعد المهندسين على فهم أفضل للمشكلات والتدخل عند الضرورة. وهذه
الروبوتات التي تعمل بالتحكم عن بعد ذات أذرع هيدروليكية وأدوات قابلة للتبديل مثل
المناشير والقواطع التي تستخدم لمهام التدخل، وحتى بعد تغطية البئر استخدمت
الروبوتات لعمل دوريات في موقع البئر والتأكد من أن البترول لا يتسرب.
في فحص البيئات الخطرة:
زادت أهمية الروبوتات
من أجل التفحص والبحث في البيئات الخطرة، فهذه الروبوتات قادرة على دخول بركان نشط
لجمع معلومات أو مبنى مشتعل للبحث عن ضحايا. فالروبوتات مثل روبوت سكاوت
ثروابل تستخدمها وكالات تنفيذ القانون وإدارات الحرائق للمساعدة في العثور على معلومات
حول البشر العالقين في مبنى ما، وحتى أنها تملك القدرة على الكشف عن قنابل أو
متفجرات في المنطقة. وتلك الروبوتات بدون قائد تعمل أيضاً على حماية الأرواح
لأنها تحمي البشر من الاضطرار لدخول البيئة الخطرة دون معرفة ما ينتظرهم.
نظم الروبوت
يمكن مقارنة أجزاء ونظم الروبوت بمثيلاتها
في الجسم البشري، فالآذان والحنجرة البشرية تُستبدل بمذياع يحوّل موجات الصوت إلى
نبضات كهربائية بينما يقوم مكبر صوت آخر بالعملية العكسية. وتقوم خلية كهروضوئية
أو آلة تصويرية تلفازية بتحويل موجات الضوء إلى نبضات كهربائية، وهي بهذا تكون
بديلة عن العين
البشرية. والنبضات
الكهربائية التي تصدر عن المذياع أو آلة التصوير في الانسالة، تتشابه والرسائل
العصبية والنبضات المتدفقة عبر الجهاز العصبي للإنسان، وهي تتحرك في الانسالة
بواسطة أسلاك من نحاس أو عن طريق الدوائر الكهربائية المطبوعة على صفيحة السليكون،
وبدلا من الأوعية الدموية في الإنسان فإن الانسالة تحتوي على شبكة من الأنابيب
فيها سوائل ذات قوة ضغط معينة، حيث تتحرك الأخيرة عن طريق الضغط الهيدورليكي لهذه
السوائل.
الأنظمة البصرية في الروبوت
كانت العين في الانساليات القديمة عبارة عن
آلة تصويرية تنقل المعلومات المرئية إلى البرمجيات لغرض تحليلها، وكانت إنسالات
هذا النموذج تواجه صعوبة في تمييز ما إذا كانت تتحرك نحو الأمام أو بشكل دائري في
حلقة مفرغة، وكان سبب هذه الصعوبة هو اعتمادها على عين واحدة. إنكب الباحثون منذ
عام 2003 على ابتكار إنسالة يمكنها الاعتماد على أكثر من عين واحدة، حتى تتمكن من
الحراك بفعالية أكبر، ويُشبه الباحثون الأسلوب القديم للرؤية في الانسالة بالنظر
من خلال إسطوانة ضيقة يصعب فيها الحصول على رؤية شمولية خاصة عند الالتفات، والحل
حسب الباحثين في جامعة ميريلاند في الولايات المتحدة هو نصب عين متطورة في مؤخرة
الجزء العلوي من الإنسالة، وهذه الأخيرة عبارة عن 9 آلات تصوير رقمية بجم كرة قدم
مصغرة، يُطلق عليها “عين أرغوس”
(بالإنجليزية: Argus eye) تيمنا بالإله اليوناني الذي كان جسده مغطى
بمئات العيون. تختلف نظم العين في الإنسالة حسب نوعها، ففي الإنسالات البسيطة يكون
نموذج العين عبارة عنمقاومة كهربائية إلى آلات تصويرية فائقة الدقة مزودة ببرمجيات
معالجة الضوء
(بالإنجليزية: light detection and
processing systems) في
الانسالة ات المتطورة، ويفضل العلماء محاكاة نموذج عين الحشرات لصناعة وتصميم
الأعين الانسالية وذلك لصغر حجم الدماغ ومركز معالجة المرئيات في عقل الحشرات،
المماثل لذاك الخاص بالإنسالة.[28] تحتوي الأعين الانسالية في إنسالة “سبيرت”
الموجودة على سطح المريخ على آلة تصوير بانورامية (بالإنجليزية: Pancam) قادرة على الالتفاف 360 درجة ونقل صورة
شمولية للسطح المحيط بها. يبلغ وزن هذه الآلة 270 غرامًا وحجمها بقدر قبضة اليد
وباستطاعتها إنتاج صور يصل مقدار العنصر فيها إلى 24,000 بكسل.[29]
اللغة الإنسالية
إن نظام تمييز وتحليل الأصوات المسموعة في
الإنسالة هو عبارة عن تحويل للإشارات الصوتية التي يتم التقاطها بواسطة المذياع
إلى مجموعة من الكلمات المكتوبة المفهومة للإنسالة، والمخزونة في برمجياتها، التي
تقوم بدورها بتحليل ومحاكاة فهم اللغات الطبيعية. ويُطلق على هذه العملية “معالجة
اللغات الطبيعية“. وهناك العديد من التقنيات المستخدمة في تمييز وتحليل الأصوات
منها: الشبكات العصبونية الاصطناعية والشبكات العصبونية أمامية التغذية خلفية
النقل والتحويل الفوريي السريعوالشبكات العصبونية العادية. كذلك يمكن زرع ما يُسمى
ببرمجيات تمييز المحادثة
(بالإنجليزية: Speech Recognition
Software) ونموذج
العتاد الصلب لتمييز المحادثة
(بالإنجليزية: Speech Recognition
Hardwarew Module) في
الإنسالة حتى تستطيع التعرّف على الأصوات المحيطة وتحليلها، وتُعتبر الأولى أكثر
تطورًا من الثانية، إلا أنها لا تحلل سوى لغات محدودة.
ومن الأمثلة على التواصل اللغوي والإنسالة:
إصدار إيعاز إليها بالذهاب إلى غرفة معينة كالمطبخ، فتلتقط كلمة “المطبخ” مع كل
البيانات المتعلقة بتلك الكلمة من ناحية الوظيفة والأجواء المتعلقة بها والمخزونة
في عتاد الحاسوب، فتتجه إلى هناك، أما بحال أعطيت إيعاز غير مفهوم أو إيعاز غير
منطقي كاختراق جدار مثلاً، فإن الإنسالة ومن خلال عملية التغذية الراجعة حسب منظور
علم السيبرنيتيك، تقدم على إرسال إيعاز جوابي مضمونه إما أن الإيعاز غير مفهوم أو
غير منطقي. فيثمانينيات القرن العشرين كان الباحثون يغذون برمجيات الانسالة
بإيعزات مكونة من جملة أو جملتين مثل “تحرك”، “التفت يمينًا”، ولكن بدأ التركيز
مؤخرًا على جمل طويلة ومعقدة مشابهة لأساليب التحدث عند الإنسان.
المستشعرات الإنسالية
المستشعرات هي نظم حسيّة. يقوم المستشعر
بالتقاط نمط معين من البيانات التي يُصار إلى تحليلها بواسطة البرمجيات، مما يُنتج
ردة الفعل المناسبة والمبرمجة في الانسالة، وفيما يلي بعض المستشعرات التي لاتتوفر
كلها في جميع أنواع الانسالات
حركة الروبوت
تحوي سيقان الروبوت المتطورة في بعض
الأحيان أكثر من 40 مستشعر وأداة ميكانيكية مائعية، وتقوم المستشعرات بقياس توزيع
الضغط المسلط على السيقان بصورة مستمرة، وقد تم في عام 2004 صناعة سيقان إنسالية
يمكن تركيبها على سيقان الإنسان لتساعد في تحويل الخطوات البشرية الطبيعية إلى
خطوات سريعة واسعة دون بذل الشخص أي مجهود عضلي،[36] وقد تمت تسمية هذا الاختراع
بالهيكل الخارجي، وبلغ وزن تلك السيقان حوالي 50 كيلوغرامًا. يُعتبر تنسيق الخطوات
في الإنسالات بشكل يحاكي خطوات الإنسان عملية معقدة جدًا،[37] لذا يلجأ العلماء
عادةً إلى استعمال العجلات بدلا من السيقان. من أنواع الانسالات المتطورة التي
تتحرك باستعمال ساقين: إنسالة سيغمو وإنسالة كريو وإنسالة أسيمو. كان العلماء
ينصبون سيقان متعددة تصل إلى 6 سيقان في الإنسالات القديمة، ذلك أن تعدد السيقان
يوفر الثبات والتوازن، ولم تكن التقنية الخاصة بتثبيت تلك الآلات وجعلها تتوازن
على قائمتين قد أصبحت متاحة بعد، وعلى الرغم من التطور الحاصل اليوم في مجال
الإنساليات، فإن تقليد الساق البشرية ما يزال أصعب من تقليد اليد، ذلك أن صناعة
الساق تقابلها مشكلة رئيسية هي مشكلة التوازن التي يتطلب حلها كثيراً من الجهد
والمال والوقت، لذا تُفضل الكثير من الشركات أن تصنع إنسالاتها بأربع سيقان بدلاً
من اثنين. وليست فكرة إنتاج آلات تستطيع المشي والانتقال بفكرة حديثة العهد، فقد
استخدم البعض منها خلال السنوات القليلة الماضية في العمليات الزراعية وفي أعمال
الحفر، ومن أشهر تلك الآلات المتحركة شاحنة ذات أربع سيقان أنتجتها شركة جنرال
إلكتريك للجيش الأمريكي، ويتحكم بها سائقها عن طريق تحريك يديه وساقيه المتصلتان
بسيقان الشاحنة.
فكرة الروبوت عبر العصور
يمكن تقفي جذور الروبوت الحديث، إلى
أجهزة آلية اخترعت في الماضي البعيد وأطلق عليها “الآلات ذاتية الحركة”. ففي طيبة
في عهد قدماء المصريين حوالي عام 1500 قبل الميلاد، ابتُكر تمثال للملك ممنون كان
يُصدر أصواتًا موسيقية جميلة كل صباح. وفي اليونان – خلال القرن الرابع ق.م. –
اخترع أركيتاس عالمالرياضيات، حمامة آلية قادرة على الطيران. وفي القرن الثالث قبل
الميلاد، اخترع ستيسيبيوس العديد من الأجهزة الآلية ومنها آلة موسيقية تشبه الأرغن
تعمل بالمياه، إضافة إلى ساعة مائية، ولم تكن هذه أول ساعة مائية في التاريخ، فقد
عرفها قدماء المصريون سابقًا، ولكن تميزت ساعة ستيسيبيوس بأنها كانت مزودة بجهاز
يجعل من مستوى المياه ثابتًا، وكانت تعمل بنفس طريقة الغرفة العائمة في مازج
السيارات الحديثة.
دمية كاراكوري يابانية أليّة مخصصة
لتقديم الشاي من القرن التاسع عشر في متحف طوكيو

الاشتراك في:
التعليقات (Atom)